Maintenance steps of Eston Palletizing robot
Release-Zeit:2023-08-10 14:42:06
Erstens: Maschinenreinigung
First, disconnect the power supply and remove debris around the machine. Wipe the surface of the machine with a clean cloth to ensure that there is no dust, grease and other impurities. For the cleaning of the inside of the machine, professionals are required to operate.
Two: Look at the machine parts
View all parts of the machine, including cables, sensors, motors, and mechanical parts. Ensure that the connection of all components is strong and will not loosen or fall off. If there is any problem, it needs to be repaired or replaced in time.
Three: Smooth machine
According to the instructions of the machine, regularly add the smoothing agent to the machine parts. This ensures that the machine components work smoothly and prevents wear between machine components.

-
 202410-21
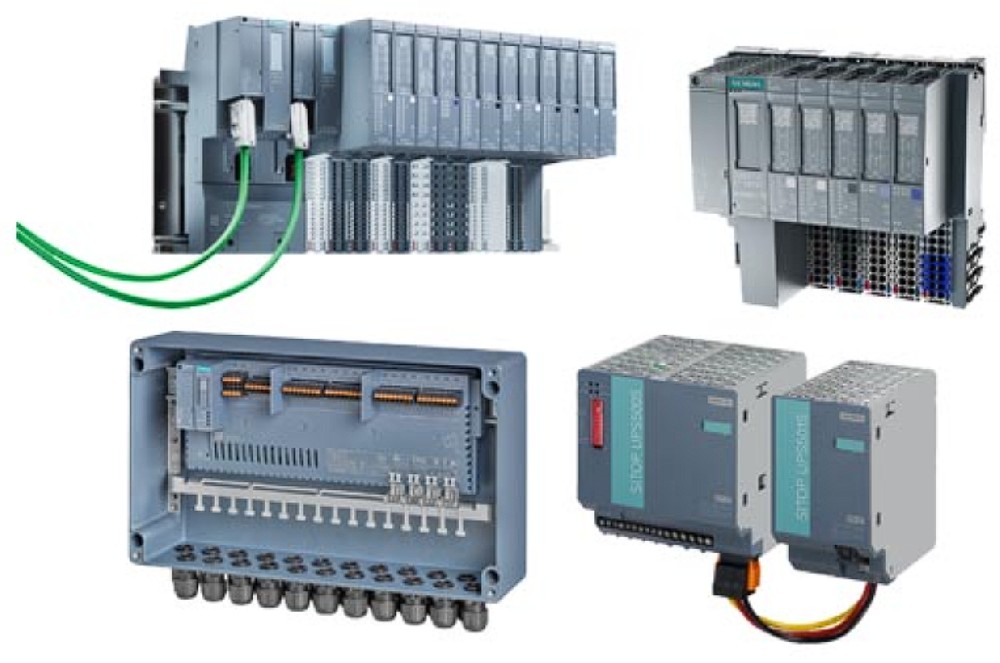
202410-21Ein- und Ausgabemodule: Alles, was Sie wissen müssen
I/O-Module (Eingangs-/Ausgangsmodule) verwalten die Kommunikation zwischen der CPU und dem Netzwerk, einschließlich Datenübertragung, Leistungslastmanagement und Maschinenfunktionssteuerung. Es ermö···
-
 202305-12
202305-12Das Festplattenlicht des Advantech-Industriecomputters 610L leuchtet nicht
Hard disk fault: The hard disk may be faulty, causing the hard disk indicator to be off. You can try to restart the computer. If it still does not light up, check whether the hard disk is recognized b···
-
 202309-14
202309-14Yaskawa-Servoantrieb-Debugging-Verfahrensschritte
1. Basic wiringThe main power input is 220V, which is connected from L1 and L3 (the actual use should refer to the operation manual); Control power input r, t can also be directly connected - 220V; Mo···
-
 202301-09
202301-09Die Eigenschaften der explosionsgeschützten Wechselrichterbox von Schneider
1. Aluminiumlegierung Schale oder Stahlblech Schweißen, Kunststoff Spritzen Aussehen;2. Eingebauter Wechselrichter, Leistungsschalter, Signalleuchte und andere Komponenten, die von Haushalts- oder Sc···
-
 202302-28
202302-28Omron plc Wartungsverfahren und Ausrüstung regelmäßige Reinigung Vorschriften
I. Wartungsverfahren, regelmäßige Gerätetests und Einstellvorschriften(1) Überprüfen Sie alle Hälfte eines Jahres oder Quartals den Anschluss der Verdrahtungsklemmen im SPS-Schrank. Wenn lose St···


 +86 13811814778
+86 13811814778 +86 13811814778
+86 13811814778
 Gebäude 26, Gemeinde Liyuan, Bezirk Chaoyang, Peking, China
Gebäude 26, Gemeinde Liyuan, Bezirk Chaoyang, Peking, China